
Bersama beberapa teman, awal tahun ini saya memutuskan untuk berpartisipasi dalam Carbage menjalankan edisi Musim Dingin 2025. Ini adalah perjalanan 6 hari di musim dingin melalui Swedia ke lingkaran kutub, dan kembali ke Helsinki dalam rombongan yang terdiri dari sekitar 400 mobil.
Satu hal kecil (Anda mungkin sudah bisa menebaknya dari namanya): mobil Anda harus “carbage”. Dalam praktiknya, ini berarti harus berusia minimal 20 tahun, dan dengan nilai harian kurang dari €1000.

Rute ini, termasuk perjalanan pulang pergi dari Belgia berarti berkendara sekitar 6000 km hanya dalam waktu seminggu, seringkali dalam kondisi yang kurang ideal. Selain itu, mobil kita juga akan dinilai berdasarkan orisinalitasnya, itulah sebabnya ide ini muncul di kepala saya:

Mengapa tidak menjadikannya self-driving?
Bagi yang belum tahu: ada proyek bernama ini pilot terbukadikembangkan oleh koma.ai yang menambahkan fitur bantuan pengemudi tingkat lanjut L2 (kata-kata indah untuk mengemudi mandiri sebagian seperti Autopilot Tesla) ke lebih dari 275+ model mobil yang didukung seperti Toyota, Honda, Hyundai, VW, … Sial, bahkan ada dukungan untuk Tesla Model 3/Y!
Kata kuncinya di sini adalah “terkini”, artinya: mobil yang dapat ditopang harus memiliki cara elektronik untuk menggerakkan kemudi, gas, dan rem. Hal ini terjadi di hampir semua mobil modern, karena fitur bawaan ADAS seperti bantuan penjaga jalur dan kontrol jelajah adaptif semakin umum.
Dalam hal ini, aktuator biasanya diimplementasikan dalam bentuk Electric Power Steering (EPS), penguat rem elektrik/pompa ABS dan unit kendali mesin elektronik. Ini kemudian menerima perintah aktuasi (yang masuk akal) melalui pesan CAN-bus dari modul kamera atau sejenisnya, yang kemudian dapat dicegat dan diganti dengan perintah yang lebih sesuai untuk openpilot.
Secara kebetulan, saya telah bekerja di comma.ai selama sekitar 5 tahun sebagai insinyur perangkat keras, jadi saya cukup paham dengan cara kerja keseluruhan sistem. Beberapa tahun yang lalu, saya bahkan memberi pembicaraan tentang mengendalikan mobil itu lebih mendalam.
(omong-omong: kami sedang merekrut!)

Ini adalah mobil yang kami beli, yang tidak terlihat di lelang online: Volvo 940 Estate tahun 1993. Meskipun kondisi catnya tidak menunjukkan hal itu, ternyata kondisinya sangat bagus untuk mobil berusia di atas 30 tahun.
Seperti yang bisa Anda bayangkan, perangkat elektronik di mobil ini sangat sedikit: kemudinya hidrolik, akselerator digerakkan oleh kabel antara pedal gas dan karburator, dan booster rem berbasis vakum.
Mari kita bahas ini satu per satu dan jelaskan bagaimana kita dapat melakukan retrofit pada aktuator yang diperlukan:
Mungkin aktuator terpenting yang dibutuhkan agar tetap berada di jalur yang benar (dan yang ternyata paling rumit untuk diadaptasi secara mekanis) adalah untuk bantuan kemudi. Seperti disebutkan, Volvo dilengkapi dari pabrik dengan a bantuan bertenaga hidrolik di rak kemudi.
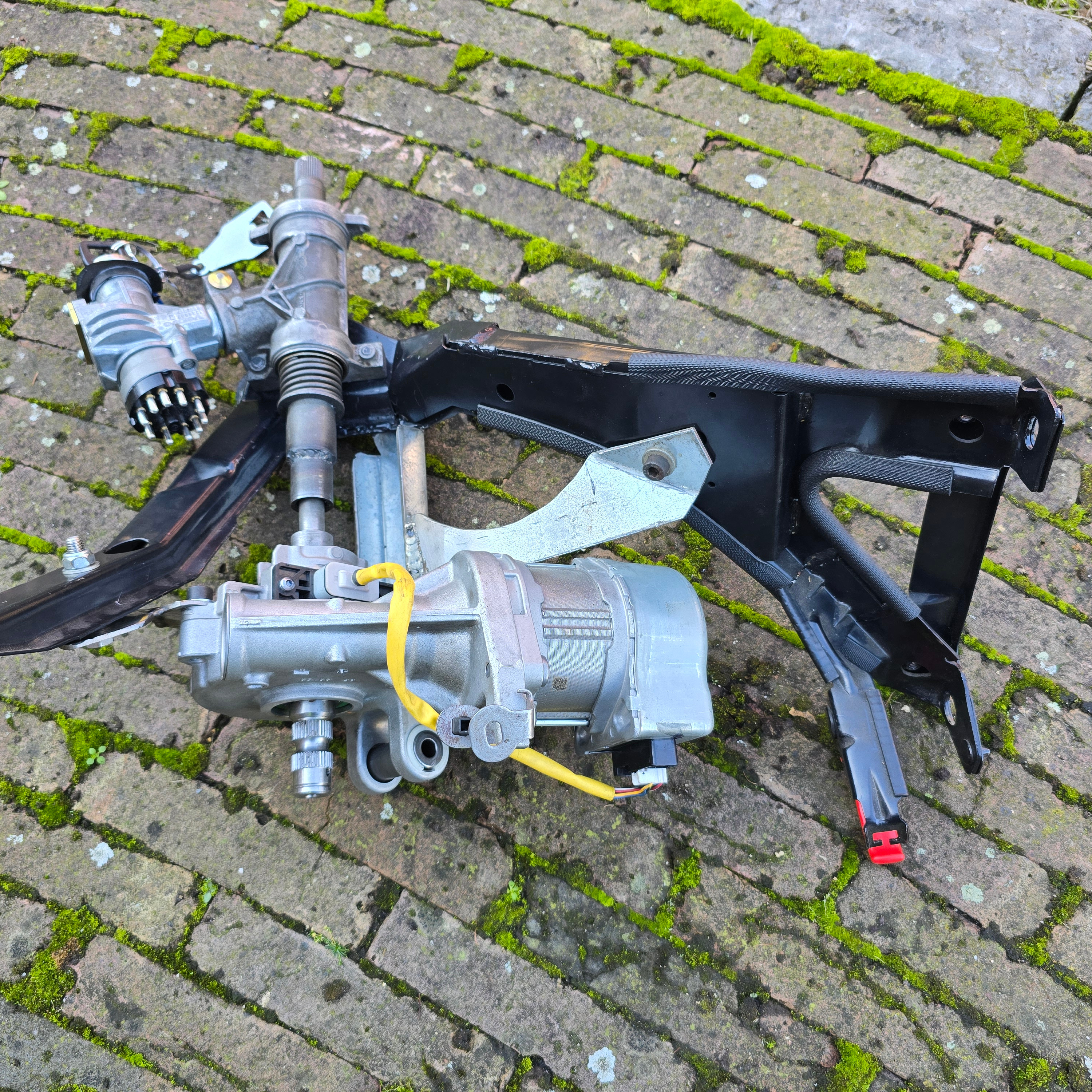
Untuk dapat memberikan torsi pada roda secara elektronik, opsi paling layak yang kami temukan adalah dengan melakukan retrofit aktuator/ECU power steering elektrik dari Toyota Corolla 2020. Pada Corolla, motor ini dipasang pada kolom kemudi di belakang dashboard, dan memperkuat torsi pengemudi yang diukur ke poros keluaran.

Rak kemudi Corolla 2020 kami dapatkan dari tempat barang rongsokan
Meskipun rak penuh terlihat cukup besar, sebagian besar terkait dengan fitur penyesuaian roda kemudi, yang dapat dilepas untuk keperluan penggunaan kami. Untuk memasangnya di belakang dasbor, kami mengeluarkan kolom kemudi poros lurus asli dari Volvo dan memasang EPS di antaranya:


Kami memotong sebanyak mungkin dari rak Corolla dan mengelas spline antarmuka ke bagian atas kolom Volvo asli (yang juga kami potong-potong)
Dengan motor yang kini berada di kolom, kami menambahkan beberapa penguat tambahan dari rangka kemudi asli ke EPS:
Selain motornya sendiri, Corolla juga memiliki sensor sudut kemudi eksternal. Meskipun motor EPS memiliki satu motor bawaan, motor ini hanya digunakan untuk sudut relatif presisi yang diperlukan untuk loop kontrol bagian dalam. Sensor sudut eksternal menyediakan pengukuran sudut absolut (nol derajat saat mobil bergerak lurus), yang juga diperlukan untuk kode pengontrol mobil openpilot.

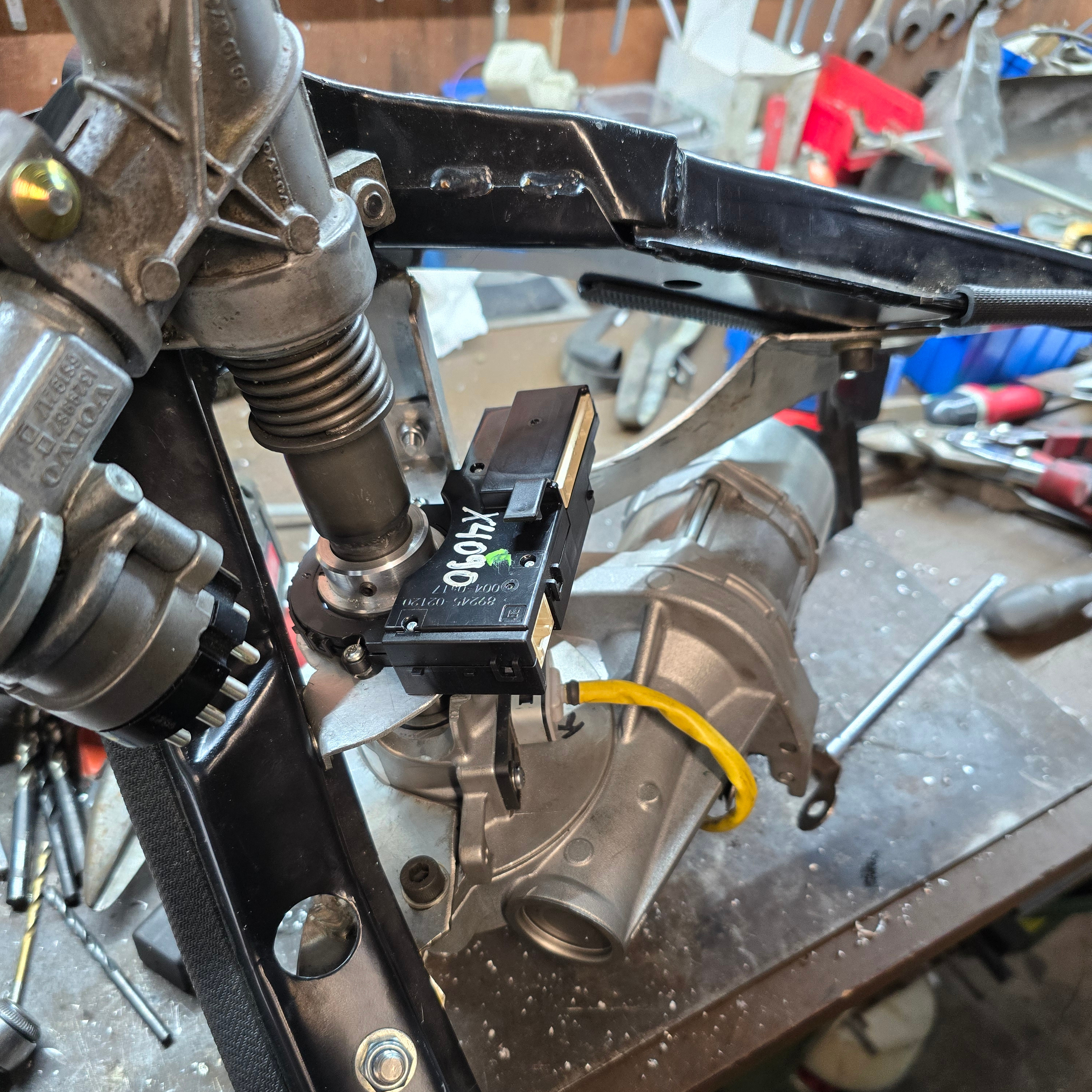
Pemesinan bushing untuk menghubungkan sensor sudut ke poros kolom kemudi, dan sensor dipasang.
Dengan motor dan sensor sudut yang dipasang di subframe kemudi, maka dapat dipasang kembali di mobil. Yang mengejutkan kami, terdapat cukup ruang di bawah dasbor untuk menampung semua perangkat keras tambahan ini, dan tidak diperlukan modifikasi lebih lanjut untuk mengaktifkan kembali dasbor!

Saya akan membahas lebih jauh tentang perkabelan di postingan blog mendatang, namun ringkasannya: menghubungkan motor dan sensor sudut secara elektrik sangatlah mudah. Karena Anda dapat mengunduh referensi skema dan konektor dari Toyota dengan sedikit biaya, mudah untuk mengetahui bahwa rak kemudi hanya memerlukan GND, konstan 12V (menyatu pada 80A!), sinyal “pengapian” 12V dan CAN ke sudut sensor.
Hanya dengan itu, EPS menjadi hidup (kemungkinan dalam mode pincang karena tidak ada beberapa pesan Toyota yang diharapkan dengan kecepatan mobil saat ini,…) dan berfungsi dengan baik seolah-olah berada di mobil aslinya.
Bagaimana dengan bantuan kemudi hidrolik asli? Bukankah Anda memiliki dua sistem sekarang?
Pengamatan yang bagus. Singkatnya: ya.
Meskipun Anda dapat menonaktifkan bantuan tenaga hidraulik dan hanya mengandalkan bantuan tenaga listrik yang baru, saya khawatir rak kemudi mungkin tidak dirancang untuk menangani jumlah torsi lebih tinggi yang terus-menerus diterima dari EPS selama berkendara normal dan mungkin berpotensi aus. seiring berjalannya waktu.
Kemudi berfungsi dengan baik dengan kedua sistem aktif (sehingga kemudi menjadi bagus dan ringan juga!), tetapi tidak ideal. Salah satu kelemahan dari mengaktifkan kedua assist adalah mobil tidak memiliki torsi pemusatan otomatis yang cukup untuk menggerakkan kedua sistem dan memusatkan roda kemudi saat Anda melepaskan roda di tikungan; Itu tetap di tempat Anda meletakkannya.
Mungkin ada beberapa cara untuk mengatasinya, meskipun saya belum mencobanya. Misalnya, tekanan hidraulik dalam sistem dapat dikurangi, sehingga bantuan asli menjadi kurang bertenaga.
Mungkin fitur paling efektif yang ditawarkan mobil modern untuk mengurangi beban pengemudi dalam perjalanan jauh adalah kontrol jelajah adaptif. Untuk bisa mengikuti mobil di depan Anda pada jarak yang aman tanpa intervensi manual, mobil harus bisa mengerem secara otomatis.
Seperti yang bisa Anda tebak sekarang: ini bukanlah sesuatu yang dibuat oleh Volvo yang berusia 30 tahun dari pabriknya. Awalnya, rem mobil mengandalkan sistem bantuan vakum sederhana untuk memperkuat tekanan yang diberikan pengemudi pada pedal rem, yang pada gilirannya mendorong master silinder.
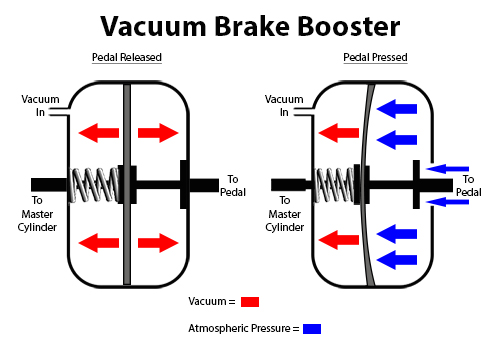
Diagram sistem pengereman berbantuan vakum (Sumber gambar: Balapan Puncak)
Untungnya, mobil modern masih bekerja dengan cara yang hampir sama. Faktanya, sistem yang digunakan Tesla misalnya didasarkan pada Bosch iBooster, yang hanya menggantikan bantuan vakum dengan sensor gaya dan motor listrik:
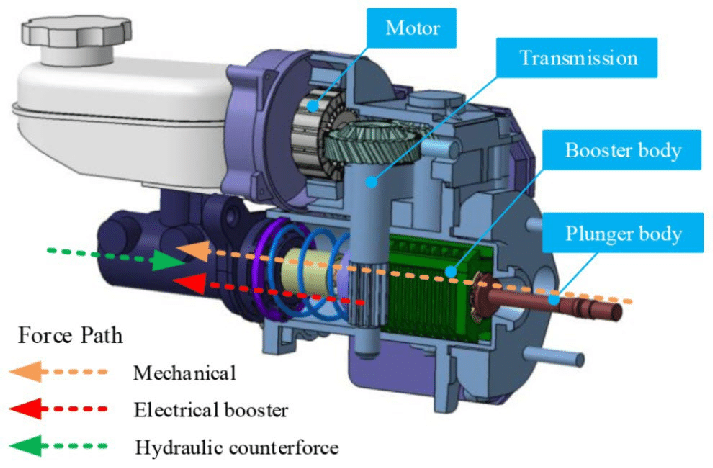
Diagram Bosch iBooster (Sumber)
Sayangnya, iBooster ini diketahui sangat berguna untuk proyek konversi EV, karena ini merupakan pengaturan yang jauh lebih bersih daripada harus mengganti sumber vakum mesin asli agar booster asli dapat berfungsi. Juga diketahui secara luas bahwa iBooster ini masuk ke mode lemas tanpa CAN terhubung, dan dengan demikian dapat digunakan (tanpa fitur yang dapat dikontrol) tanpa harus melakukan pekerjaan rumit apa pun.
Salah satu perusahaan yang menggunakan iBooster ini dalam proyek konversinya adalah EVcreate, yang berlokasi di Belanda. Mereka juga menerbitkan beberapa postingan blog yang mengagumkan tentang penggunaan iBoosters, seperti yang ini di mana mereka menunjukkan cara menghubungkannya.
Karena penggunaannya yang luas, harga iBoosters cukup mahal di pasar barang bekas (terutama dibandingkan dengan mobil lainnya!). Karena kasusnya seperti ini, saya membuat kesepakatan dengan Lars dari EVcreate di mana dia dengan murah hati memberi saya iBooster sebagai imbalan atas penelitian yang diperlukan agar mereka dapat dikontrol melalui CAN, di luar zona nyaman Tesla mereka. Lars, jika Anda membaca ini: sekali lagi terima kasih!
Inilah bagian yang mengejutkan saya:
Setelah melepas penguat vakum dari Volvo, saya sepenuhnya berharap harus merancang dan mengelas pelat adaptor agar sesuai dengan mobil. Hal ini sangat benar! Pola lubang baut dan lubang penyelarasan tengah berbaris dengan sempurna, dan bahkan batang dorong yang terpasang pada iBooster kira-kira memiliki panjang yang tepat untuk disambungkan kembali ke pedal. Saya katakan kira-kira, karena kami memang harus menambahkan beberapa ring 2mm ke stud berulir iBooster agar batang dorong dapat terentang sepenuhnya saat pedal tidak ditekan.

iBooster dipasang di Volvo. Terlihat hampir asli!
Saluran rem asli tidak berada di tempat yang tepat karena silinder master pada iBooster memiliki port di sisi yang berbeda, tetapi setelah memasang saluran rem tembaga baru ke blok kecil yang tampak seperti distribusi di bawah silinder, rem menjadi berdarah dan tersangkut. naik tenaga, rem berfungsi normal!
Salah satu komplikasi kecil dengan retrofit ini adalah kopling juga dioperasikan secara hidrolik dengan minyak rem dari reservoir yang sama, jadi kami harus menambahkan tangki tambahan kecil (tangki silinder master iBooster tidak memiliki port untuk ini).

Tangki kecil dengan minyak rem untuk kopling
Terkadang Anda juga ingin pergi lebih cepat alih-alih lebih lambat! Hal lain yang diterapkan Volvo secara mekanis murni.

Pedal akselerator dihubungkan ke katup udara karburator melalui kabel bowden
Ini adalah satu-satunya aktuator utama yang saya tidak dapat dengan mudah menemukan solusi otomotif modern yang cocok. Hal ini terutama karena mobil keluaran baru tidak lagi memiliki karburator, melainkan menggunakan injeksi langsung dan unit kendali mesin yang canggih. Untungnya ini juga satu-satunya aktuator yang tidak menimbulkan implikasi keselamatan yang besar, jadi mari kita retas sesuatu bersama dengan suku cadang hobi yang tersedia!
Logika kontrol jelajah standar menyatakan bahwa pengemudi dapat mengesampingkan posisi akselerator yang diterapkan hanya dengan menekan pedal akselerator lebih keras. Hal ini cukup mudah untuk diterapkan hanya dengan menghubungkan dua kabel ke katrol katup udara: kabel yang menarik paling jauh adalah pemenangnya.
Dengan mengingat hal ini, saya membeli servo RC tahan air (sangat kuat!) dari AliExpress, dan meminta mesin ayah saya katrol kedua yang dipasang di atasnya. Setelah itu tinggal merakit dudukan untuk servo, dan menambahkan beberapa bushing pemandu perunggu untuk membatasi kabel yang longgar, dan kita siap berbisnis!

Saleh yang saleh!
Meskipun ini bukan aktuator, kami juga memasang sensor radar Tesla Continental di belakang gril depan. Meskipun ACC vision-only berfungsi dalam openpilot, kemampuan mengandalkan radar nyata tetap menghasilkan pengalaman yang lebih lancar dan konsisten.

Pingping!
Pertanyaan bagus. Saya malas, jadi mungkin perlu waktu cukup lama. Di sisi lain, kita akan punya banyak waktu di dalam mobil dalam beberapa minggu, jadi mungkin?
Saya pikir bagian 2 akan membahas tentang perkabelan dan ECU khusus yang saya rancang untuk menjaga aktuator tetap nyaman, dan untuk menerapkan hal-hal seperti tombol kendali jelajah, serta membaca kecepatan, penutup mata,…
Setelah itu saya akan mengerjakan bagian 3 yang menjelaskan (dan open source) kode pada ECU dan port openpilot.
Setelah itu, siapa tahu! Apa yang Anda ingin saya bicarakan lebih lanjut?











{kind=link}